Контроллеры бесколлекторных электродвигателей для БЛА и полезных нагрузок
Отделом электроники ООО «ЮВР» завершен цикл работ по адаптации типовых контроллеров бесколлекторных электродвигателей к особенностям использования в беспилотных летательных аппаратах вертолётного типа.
Контроллеры бесколлекторных электродвигателей преобразуют постоянное напряжение батареи в трёхфазное переменное напряжение, реализуют различные режимы управления электродвигателем (режимы стабилизации тока двигателя, скорости его вращения, пр.), регулируя подаваемые на двигатель напряжение и ток. Управление контроллерами осуществляется по интерфейсам CAN, UART и посредством сигнала ШИМ.
Адаптированный тип контроллера может использоваться с электродвигателями БЛА различного назначения.
Контроллер двигателя рулевого винта БЛА располагается в корпусе модуля двигателя и представляет единую с ним конструкцию. Программное обеспечение контроллера адаптировано под особенности работы рулевого винта с самораскрывающимися лопастями. Данный контроллер серийно устанавливается на БЛА «ЭЛЕКТРОН 7».
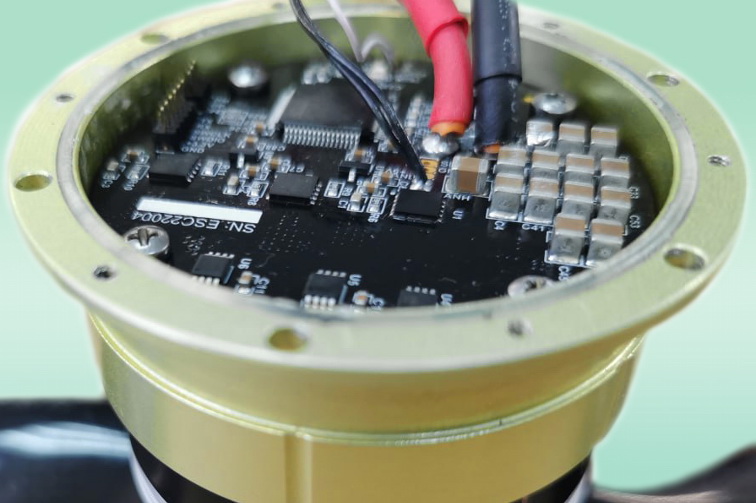
К настоящему времени разработан, отлажен и испытан прототип контроллера двигателя несущего винта БЛА. На стендовых испытаниях получена долговременная электрическая мощность контроллера более 3 кВт.
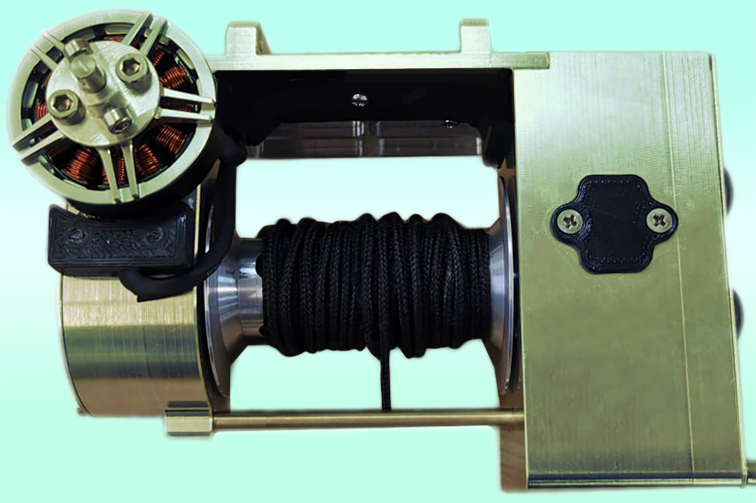
Также, бесколлекторный электродвигатель с контроллером применяется в разработанной ООО «ЮВР» лебёдке. Программное обеспечение данной полезной нагрузки адаптировано под особенности управления подъёмом и спуском груза лёгкими БЛА.